-
 Molecular Operating EnvironmentSmall Molecules | Peptides | BiologicsDrug discovery platform that integrates visualization,
Molecular Operating EnvironmentSmall Molecules | Peptides | BiologicsDrug discovery platform that integrates visualization,
modeling and simulations in a single package -
 MOEsaic - SAR ExplorerSAR Analysis | MMPs | R-Group ProfilingWeb-based application for analyzing SAR data,
MOEsaic - SAR ExplorerSAR Analysis | MMPs | R-Group ProfilingWeb-based application for analyzing SAR data,
visualizing trends and exploring new virtual leads -
 PSILOConsolidate | Search | AnalyzeProtein structure database system for
PSILOConsolidate | Search | AnalyzeProtein structure database system for
macromolecular and protein-ligand data -
 UGM & ConferencesTalks | Posters | WorkshopsEUROPEBasel, Switzerland: May 19-22 NORTH AMERICA Montreal, Canada: June 23-26
UGM & ConferencesTalks | Posters | WorkshopsEUROPEBasel, Switzerland: May 19-22 NORTH AMERICA Montreal, Canada: June 23-26
COMPUTER-AIDED MOLECULAR DESIGN
CCG is a leading developer and provider of Molecular Modeling, Simulations and Machine Learning software to Pharmaceutical and Biotechnology companies as well as Academic institutions throughout the world. CCG continuously develops new technologies with its team of mathematicians, scientists and software engineers and through scientific collaborations with customers.
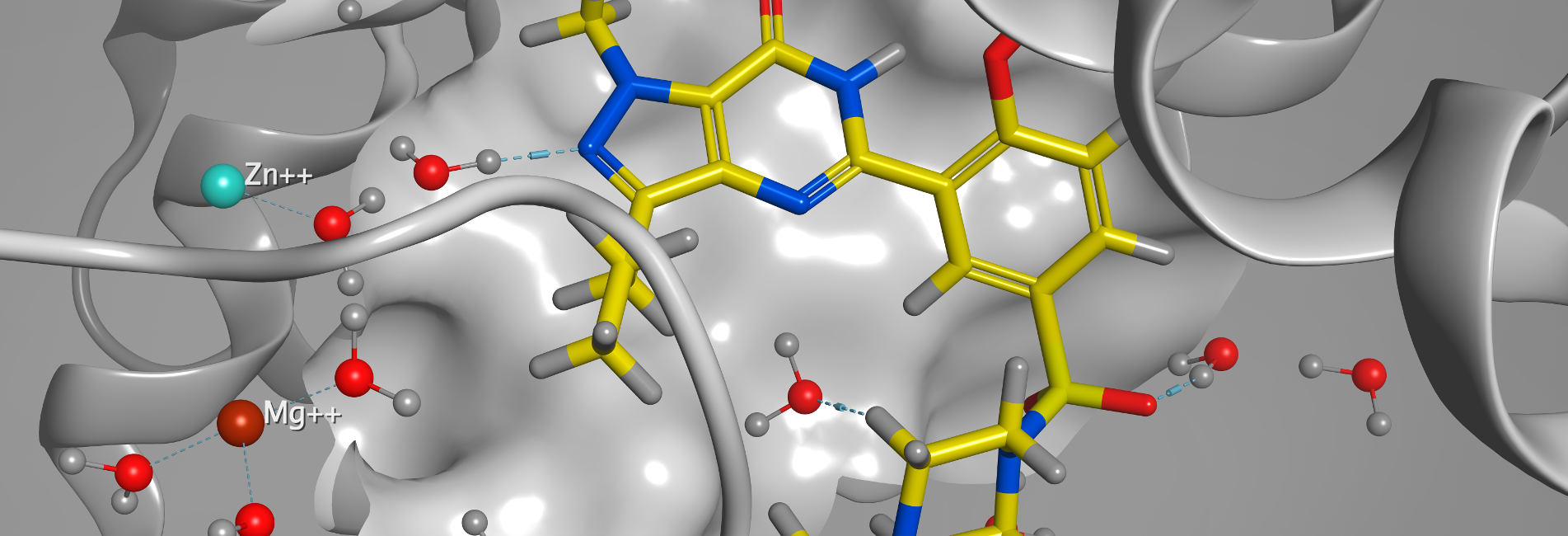
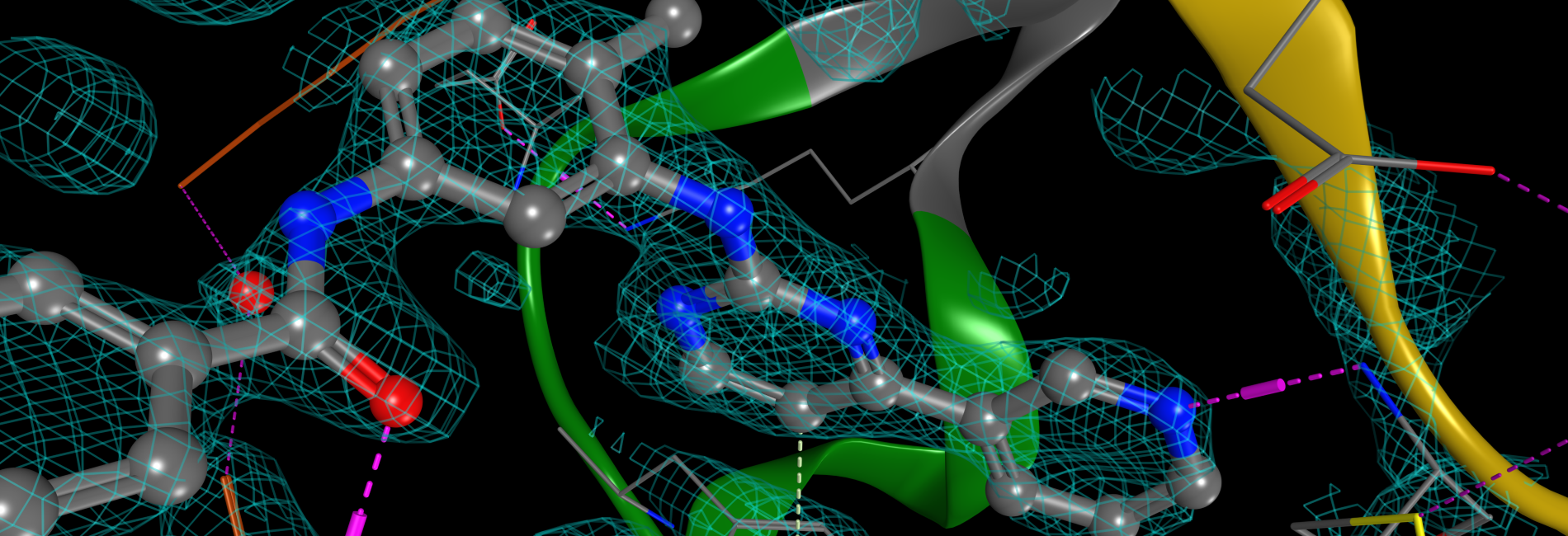
MOE
Structure-Based Drug Design
Ligand- and Fragment-Based Drug Design
Pharmacophore Screening
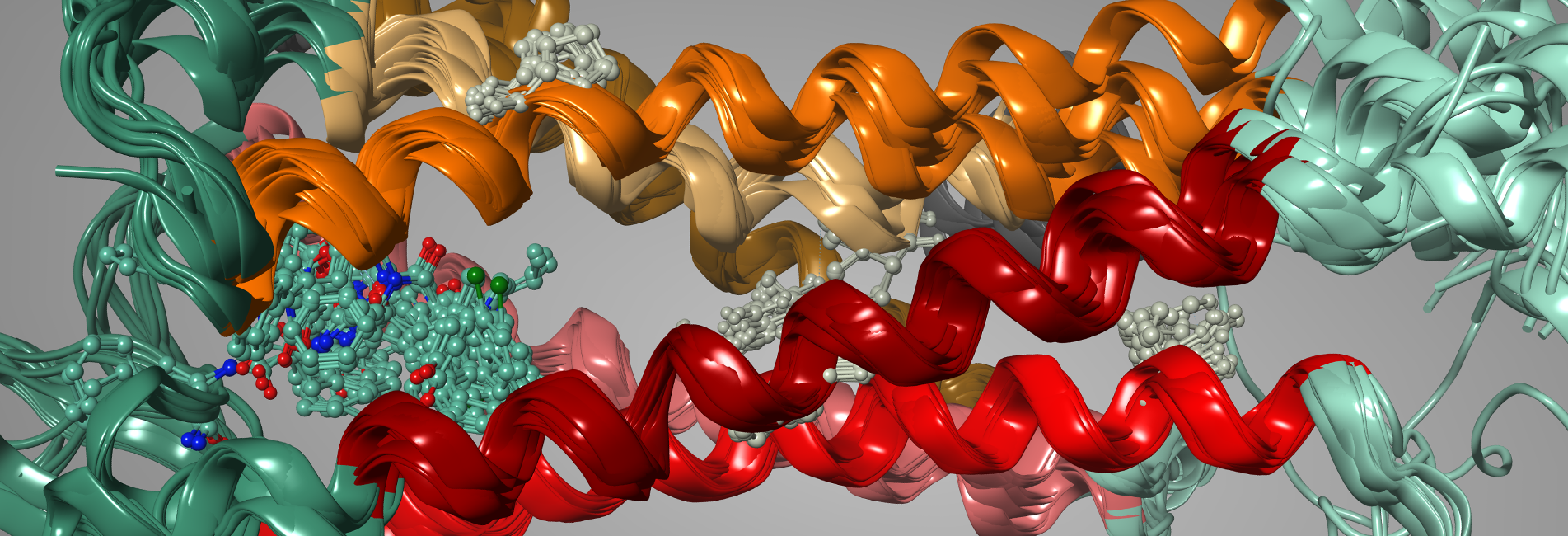
Protein, Antibody and Peptide Modeling
Molecular Modeling and Simulations
Cheminformatics and QSAR
Methods Development and Deployment
Integrated Discovery Platform

MOEsaic
Structure-Activity and Property Relationships
Visualize SAR Data and Trends
Perform Substructure and Similarity Searches
Profile and Analyze R-Groups
Analyze Matched Molecular Pairs (MMPs)
Design Novel Virtual Ligands
Document Analysis Results and Collect Notes
Web-Based SAR Explorer

PSILO
Macromolecular Repository
Data Visualization and Analysis
Browser Interface for Search and Retrieval
3D Ligand: Receptor and Pocket Similarity
Protein Structure Alignment
Data Standardization and Annotation
Standard IT Infrastructure and Integration
Protein Structure Database and Visualization System